|
Kavya Puthuveetil,
Sasha Wald,
Atharva Pusalkar,
Pratyusha Karnati,
and Zackory Erickson
arXiv Preprint, 2023
[PDF]
[Project Page]
[Code]
[Bibtex]
[Abstract]
[Video]
@misc{puthuveetil2023robust,
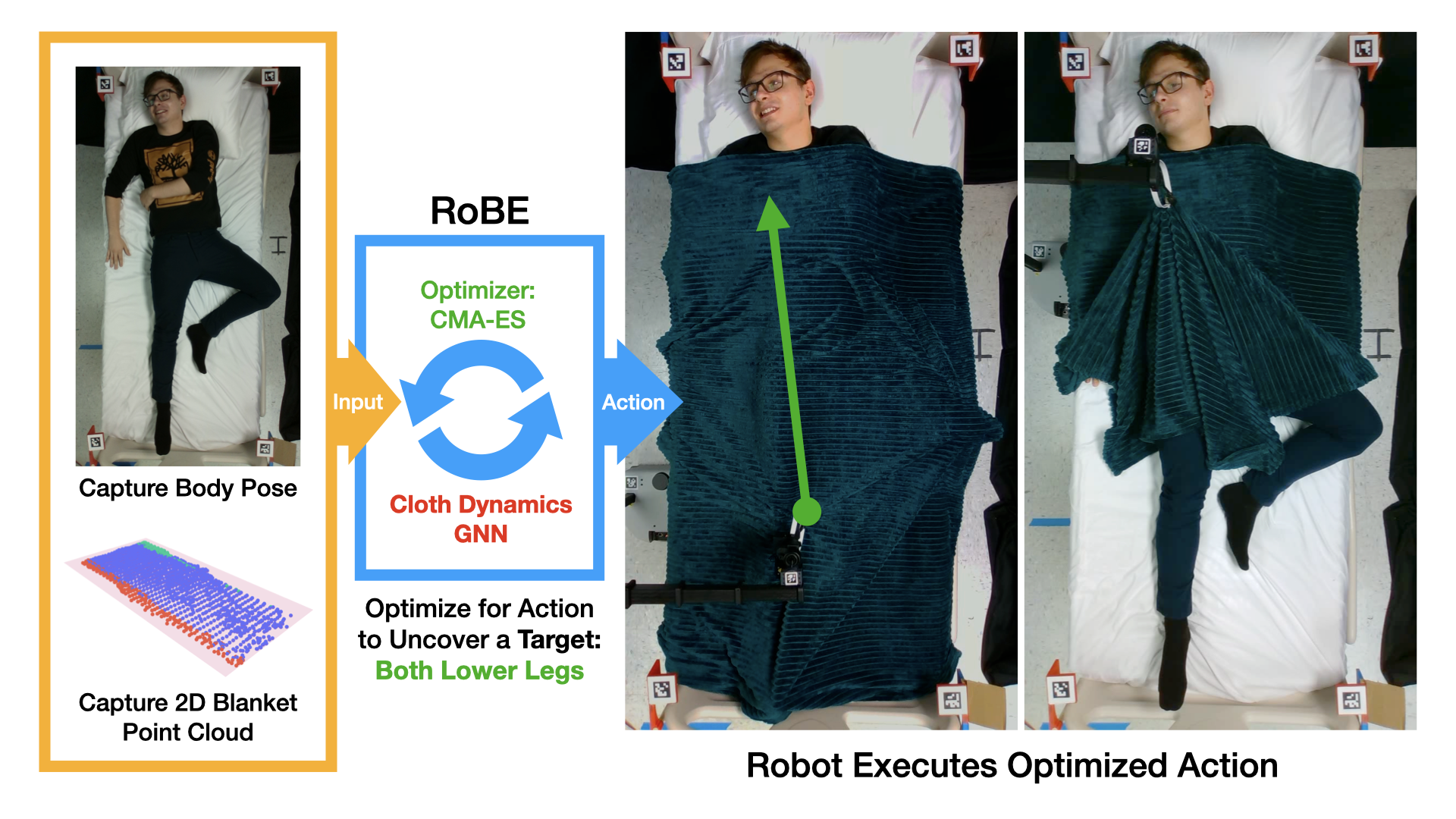
title={Bodies Uncovered: Learning to Manipulate Real Blankets Around People via Physics Simulations},
author={Kavya Puthuveetil and Sasha Wald and Atharva Pusalkar and Pratyusha Karnati and Zackory Erickson},
year={2023},
eprint={2304.04822},
archivePrefix={arXiv},
primaryClass={cs.RO}
}
Robotic caregivers could potentially improve the quality of life of many who require physical assistance. However, in order to assist individuals who are lying in bed, robots must be capable of dealing with a significant obstacle: the blanket or sheet that will almost always cover the person's body. We propose a method for targeted bedding manipulation over people lying supine in bed where we first learn a model of the cloth's dynamics. Then, we optimize over this model to uncover a given target limb using information about human body shape and pose that only needs to be provided at run-time. We show how this approach enables greater robustness to variation relative to geometric and reinforcement learning baselines via a number of generalization evaluations in simulation and in the real world. We further evaluate our approach in a human study with 12 participants where we demonstrate that a mobile manipulator can adapt to real variation in human body shape, size, pose, and blanket configuration to uncover target body parts without exposing the rest of the body. Source code and supplementary materials are available online.
|

|
Nathaniel Hanson,
Wesley Lewis,
Kavya Puthuveetil,
Donelle Furline,
Akhil Padmanabha,
Taşkın Padır,
and Zackory Erickson
IEEE International Conference on Robotics and Automation (ICRA), 2023
[PDF]
[Project Page]
[Code]
[Bibtex]
[Abstract]
[Video]
@inproceedings{hanson2023slurp,
title={SLURP! Spectroscopy of Liquids Using Robot Pre-Touch Sensing},
author={Hanson, Nathaniel and Lewis, Wesley and Puthuveetil, Kavya and Furline, Donelle and Padmanabha, Akhil and Pad{\i}r, Ta{\c{s}}k{\i}n and Erickson, Zackory},
booktitle={2023 IEEE International Conference on Robotics and Automation (ICRA)},
year={2023},
organization={IEEE}
}
Liquids and granular media are pervasive throughout human environments. Their free-flowing nature causes people to constrain them into containers. We do so with thousands of different types of containers made out of different materials with varying sizes, shapes, and colors. In this work, we present a state-of-the-art sensing technique for robots to perceive what liquid is inside of an unknown container. We do so by integrating Visible to Near Infrared (VNIR) reflectance spectroscopy into a robot's end effector. We introduce a hierarchical model for inferring the material classes of both containers and internal contents given spectral measurements from two integrated spectrometers. To train these inference models, we capture and open source a dataset of spectral measurements from over 180 different combinations of containers and liquids. Our technique demonstrates over 85% accuracy in identifying 13 different liquids and granular media contained within 13 different containers. The sensitivity of our spectral readings allow our model to also identify the material composition of the containers themselves with 96% accuracy. Overall, VNIR spectroscopy presents a promising method to give household robots a general-purpose ability to infer the liquids inside of containers, without needing to open or manipulate the containers.
|

|
Kavya Puthuveetil,
Charles C. Kemp,
and Zackory Erickson
IEEE Robotics and Automation Letters (RA-L), 2022
[PDF]
[Code]
[Bibtex]
[Abstract]
[Video]
@article{puthuveetil2022bodies,
author={Puthuveetil, Kavya and Kemp, Charles C. and Erickson, Zackory},
journal={IEEE Robotics and Automation Letters},
title={Bodies Uncovered: Learning to Manipulate Real Blankets Around People via Physics Simulations},
year={2022},
volume={7},
number={2},
pages={1984-1991},
doi={10.1109/LRA.2022.3142732}
}
While robots present an opportunity to provide physical assistance to older adults and people with mobility impairments in bed, people frequently rest in bed with blankets that cover the majority of their body. To provide assistance for many daily self-care tasks, such as bathing, dressing, or ambulating, a caregiver must first uncover blankets from part of a person’s body. In this work, we introduce a formulation for robotic bedding manipulation around people in which a robot uncovers a blanket from a target body part while ensuring the rest of the human body remains covered. We compare two approaches for optimizing policies which provide a robot with grasp and release points that uncover a target part of the body: 1) reinforcement learning and 2) self-supervised learning with optimization to generate training data. We trained and conducted evaluations of these policies in physics simulation environments that consist of a deformable cloth mesh covering a simulated human lying supine on a bed. In addition, we transfer simulation-trained policies to a real mobile manipulator and demonstrate that it can uncover a blanket from target body parts of a manikin lying in bed. Source code is available online.
|
|
Kavya Puthuveetil and Dean Krusienski
Robotics in Physical Medicine and Rehabilitation, 1st edition (preprint), 2021
[PDF]
[Bibtex]
[Abstract]
@inbook{puthuveetil2021bci,
title={Robotics in Physical Medicine and Rehabilitation},
author={Puthuveetil, Kavya and Krusienski, Dean},
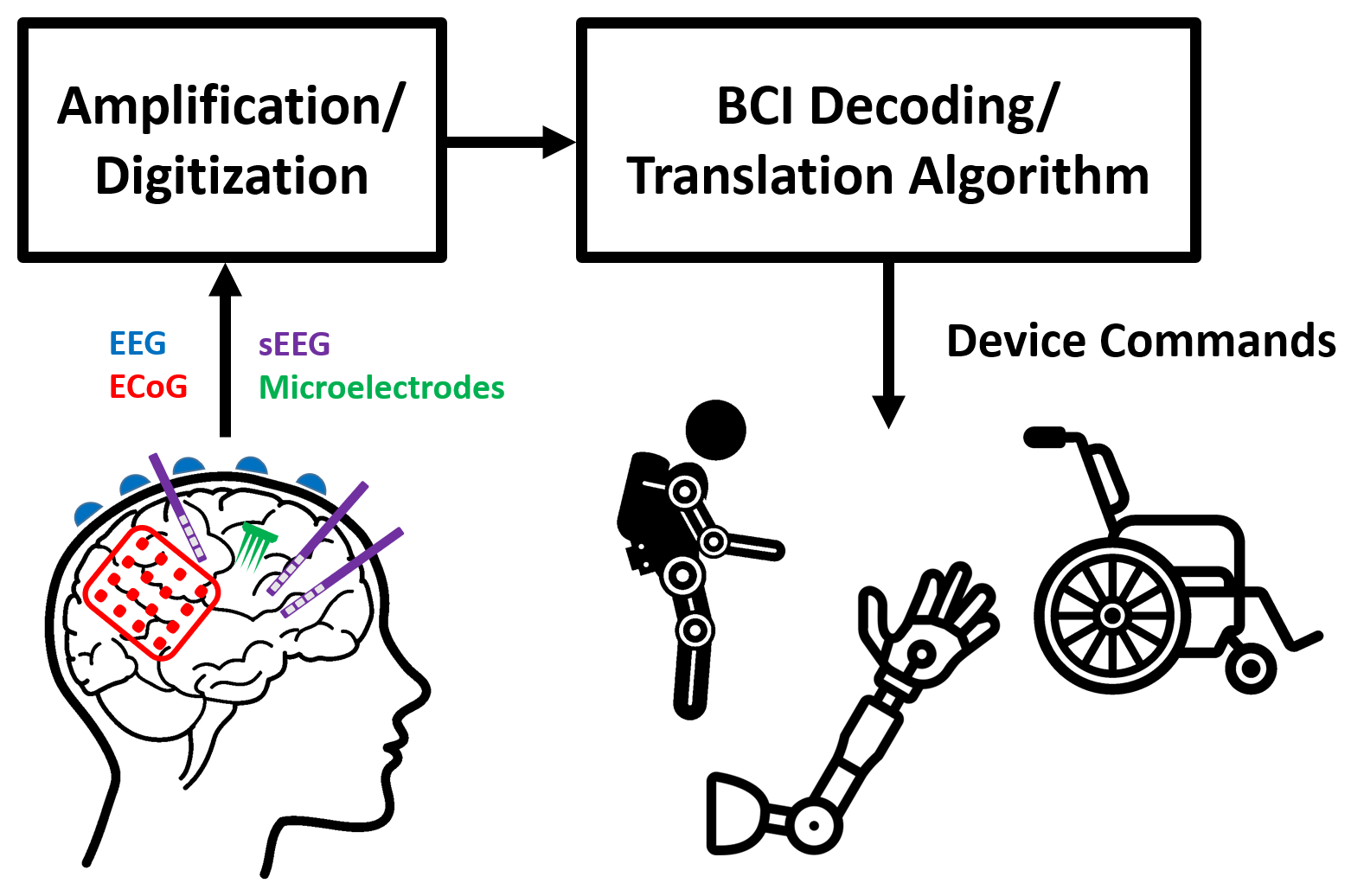
chapter={Brain-controlled Assistive Robotics and Prosthetics},
publisher={Elsevier}
year={2021}
}
This chapter provides an overview of prior and prospective work related to the control of assistive robotics and prostheses via direct measurements of brain activity. Specifically, this chapter focuses on brain-controlled robotic devices that replace, supplement, or restore lost motor function. The chapter introduces noninvasive and invasive brain signal recording modalities, common brain-actuated control signals, and a survey of applications in assistive robotics and prosthetics. The chapter concludes with a discussion of current challenges and future prospects of these technologies.
|
|
Kavya Puthuveetil,
Archana Venkatesan,
Raymond Hang,
and Dean Krusienski
2021 Society for Neuroscience Global Connectome, 2021
[PDF]
[Bibtex]
[Abstract]
@inproceedings{puthuveetil2021ormonitoringapp,
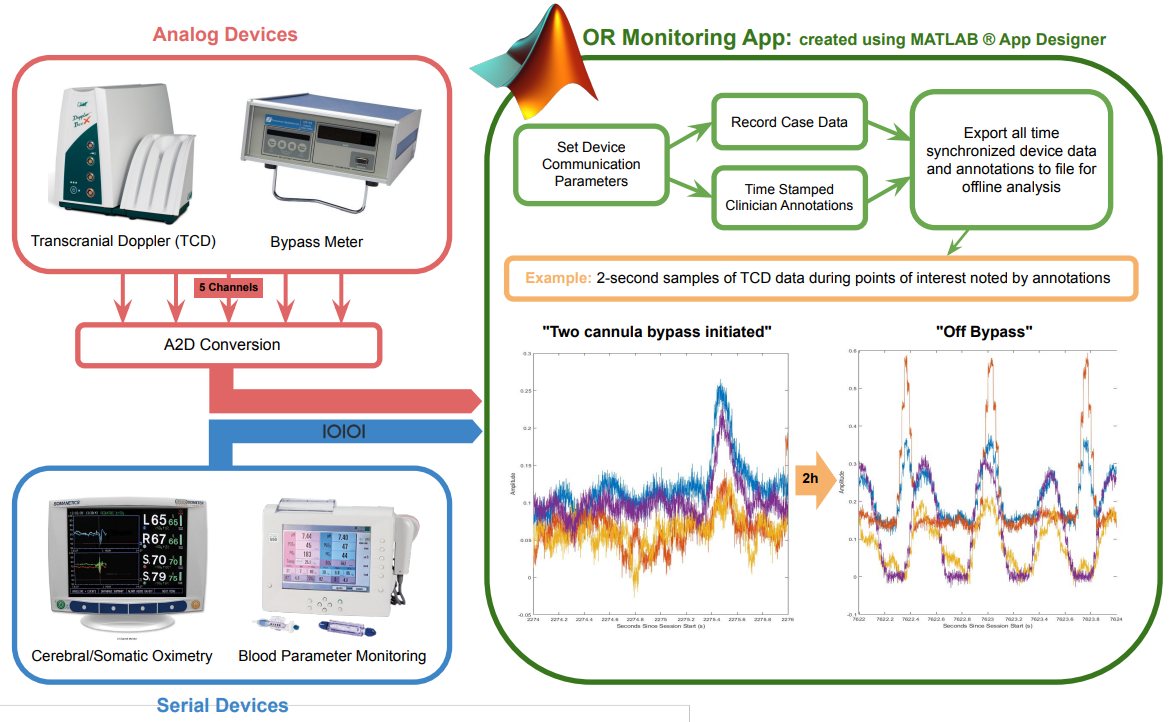
title={Development of an application for real-time acquisition and synchronization of data from operative patient monitoring instruments},
author={Puthuveetil, Kavya and Venkatesan, Archana and Hang, Raymond and Krusienski, Dean},
booktitle={2021 Society for Neuroscience Global Connectome},
organization={Society for Neuroscience},
year={2021}
}
Successful outcomes during surgery critically depend on a variety of instruments in the operating room for monitoring and regulating patients’ vitals. It is common to employ trained clinicians or teams solely dedicated to specific monitoring modalities, such as cardiopulmonary perfusion, neuromonitoring, or anesthesia, for instance. The surgeon intimately relies on these clinicians to maintain patient vitals and to communicate any irregularities seen in their respective modalities. While an active dialog about the readings from the individual instruments is maintained between the clinicians and surgeon during the case, the signals are often not systematically synchronized or permanently recorded. Such synchronization and recording have several advantages beyond creating an archival record, such as using the data to better understand and model the impacts of the interventions during a case on the vitals and patient outcomes. The ultimate objective of this research is to not only synchronize monitoring but also to enable offline analysis for improved automated event detection. An application that supports recording from a multichannel analog-to-digital converter or via serial ports was developed. The application allows for a simple configuration of device communication parameters, enabling data collection from any medical devices with an analog or RS232 output, like those for transcranial doppler and perfusate flow/blood parameter monitoring modalities in our test case. The application also allows clinicians to make time-stamped annotations about events of interest, which can then be used to identify trends in signal characteristics during procedural abnormalities. The synchronized, annotated, multichannel data can be stored and used for later inspection or analysis. In our test case in partnership with VCU Health, the recording application will be used to track annotations and record signals from neuromonitoring instruments, among others, during cardiac surgery. The collected data will be used to evaluate the efficacy of the neuromonitoring system used by the hospital in improving patient outcomes.
|
|
Arzan C. Dotivala,
Kavya Puthuveetil,
and Christina Tang
Polymers, 2019
[PDF]
[Bibtex]
[Abstract]
@article{dotivala2019shear,
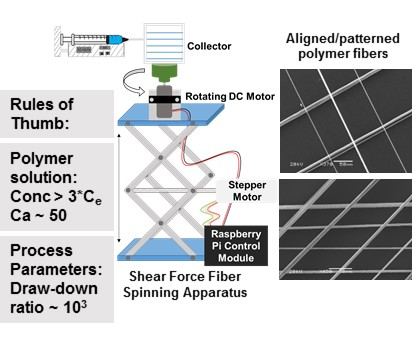
title={Shear Force Fiber Spinning: Process Parameter and Polymer Solution Property Considerations},
author={Dotivala, Arzan C. and Puthuveetil, Kavya P. and Tang, Christina},
journal={Polymers},
year={2019}
}
For application of polymer nanofibers (e.g., sensors, and scaffolds to study cell behavior) it is important to control the spatial orientation of the fibers. We compare the ability to align and pattern fibers using shear force fiber spinning, i.e. contacting a drop of polymer solution with a rotating collector to mechanically draw a fiber, with electrospinning onto a rotating drum. Using polystyrene as a model system, we observe that the fiber spacing using shear force fiber spinning was more uniform than electrospinning with the rotating drum with relative standard deviations of 18% and 39%, respectively. Importantly, the approaches are complementary as the fiber spacing achieved using electrospinning with the rotating drum was ~10 microns while fiber spacing achieved using shear force fiber spinning was ~250 microns. To expand to additional polymer systems, we use polymer entanglement and capillary number. Solution properties that favor large capillary numbers (>50) prevent droplet breakup to facilitate fiber formation. Draw-down ratio was useful for determining appropriate process conditions (flow rate, rotational speed of the collector) to achieve continuous formation of fibers. These rules of thumb for considering the polymer solution properties and process parameters are expected to expand use of this platform for creating hierarchical structures of multiple fiber layers for cell scaffolds and additional applications.
|